


Godwit G-A1 – Advanced Universal Flight Control Module
₹0.00
The G-A1 is a universal flight controller based on Pixhawk Autopilot v6X Standard, featuring redundant IMUs, high-speed Ethernet communication, STM32H7 processor and robust expansion interfaces. Designed for advanced UxV systems requiring high stability, reliability, and development flexibility.
Out of stock
G-A1 is a high-performance, universal flight controller built on the Pixhawk Autopilot v6X Standard, engineered for advanced UAV and UxV platforms that demand reliability, expandability, and high-speed data integration. Designed for professional and industrial deployments, G-A1 delivers robust processing power, sensor redundancy, and rich I/O to support complex autonomous missions.
At its core, G-A1 features a dual-processor architecture, combining a powerful STM32H753 FMU with a dedicated STM32F103 IO coprocessor. Independent buses and power domains ensure enhanced fault tolerance and operational safety. Multiple IMUs with vibration isolation, redundant barometric sensors, and a dedicated geomagnetic sensor provide accurate state estimation even in harsh flight environments.
With an integrated 10/100M Ethernet PHY, G-A1 enables high-speed communication with mission computers, payloads, and professional mapping or inspection equipment—making it ideal for surveying, mapping, and data-intensive UxV systems.

Why Choose G-A1
- Designed for Mission-Critical Systems: Dual processors, independent power domains, and sensor redundancy ensure stable operation in demanding environments.
- Built for Data-Heavy Payloads: Integrated 10/100 Ethernet enables direct, high-speed communication with mission computers, mapping cameras, and onboard payloads.
- Redundancy Where It Matters: Multiple IMUs, barometers, and a dedicated magnetometer—some vibration isolated—improve reliability and state estimation accuracy.
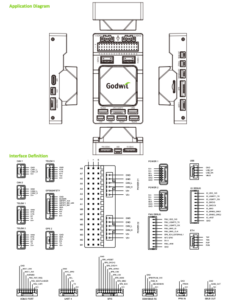
- Scalable & Expandable: Rich I/O support (CAN, UART, PWM, GPS, USB) allows seamless integration of RTK GPS, CAN peripherals, payloads, and future expansions.
- Pixhawk v6X Ecosystem Compatibility: Works natively with PX4 and ArduPilot, ensuring long-term firmware support and ecosystem stability.
Best Suited For
- Surveying & mapping drones
- Industrial inspection UAVs
- Research & autonomous platforms
- Multi-payload and Ethernet-enabled UAV systems
- OEM and system integrator builds
What’s Included
- G-A1 Universal Flight Controller (carrier board with IMU)
- Pre-installed vibration-isolated sensor stack (MicroSD card not included)
Important Notes
- Requires regulated 5V power input (see power requirements in datasheet)
- Designed for professional integration, not beginner plug-and-play builds
- Ethernet and CAN features require compatible peripherals
Related products






Reviews
There are no reviews yet.